浙江视觉定位系统价格
祝贺宁波研新工业科技有限公司经鄞州区科技局批准,成立宁波鄞州研新工业设计工程(技术)中心 2019年5月 为加快宁波市鄞州区企业技术创新体系建设,根据《鄞州区企业工程(技术)中心认定管理办法》文件精神,经企业申报,归口单位初审,项目评审及局(科协)党组会议通过,宁波鄞州研新工业设计工程(技术)中心成立。 区**希望宁波研新工业科技有限公司能有效组织中心各项工作的实施,加大科技研发经费投入,加强研发人才引进与培养,加快科技成果产业化步伐,切实增强企业创新能力。归口单位要加强监管,确保各工程(技术)中心建设有序快速发展。浙江视觉定位系统价格

研新科技的机器视觉定位系统采用先进的视觉采集及图像处理技术,先进的空间测量算法,实现对物体的空间坐标进行定位分析,并确定物体坐标。 即采用工业摄像机采集产品图像,并将图像数据传送到计算机处理系统,计算机处理系统对每幅图像进行匹配搜索,准确定位出产品的位置和方向,并将坐标、姿态等数据传输给控制系统,通过控制机械手臂等自动化装备进行对位装配等工作。 机器视觉技术的定位功能,能够自动判断物体的位置,并将位置信息通过一定的通讯协议输出。此功能可用于全自动装配和生产,譬如自动组装、自动焊接、自动包装、自动灌装、自动喷涂,多配合自动执行机构(机械手、焊枪、喷嘴等)。河北视觉定位系统诚信企业推荐
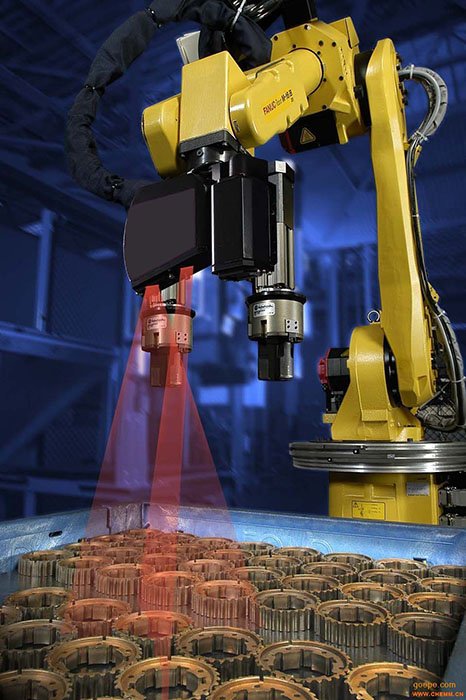
研新科技的机器视觉定位系统采用先进的视觉采集及图像处理技术,先进的空间测量算法,实现对物体的空间坐标进行定位分析,并确定物体坐标。 即采用工业摄像机采集产品图像,并将图像数据传送到计算机处理系统,计算机处理系统对每幅图像进行匹配搜索,准确定位出产品的位置和方向,并将坐标、姿态等数据传输给控制系统,通过控制机械手臂等自动化装备进行对位装配等工作。 机器视觉技术的定位功能,能够自动判断物体的位置,并将位置信息通过一定的通讯协议输出。此功能可用于全自动装配和生产,譬如自动组装、自动焊接、自动包装、自动灌装、自动喷涂,多配合自动执行机构(机械手、焊枪、喷嘴等)
宁波研新工业科技有限公司的视觉定位引导系统就是利用相机进行视觉图像获取,通过图像分析处理和图像测量的方式精确目标物体的形态、姿态、安装或加工位置的坐标信息等,计算出位置坐标,并精确进行坐标转换,提供给机械臂等控制系统进行运动控制。 研新科技在视觉引导定位系统的算法中,我们**研发了精细定位算法,是采用单目视觉定位与双目视觉定位系统相结合的一种方法,利用两台高精度工业相机,两路高清图像采集卡,同时对图像进行获取,通过图像分析处理和图像测量的方式精确目标物体的形态、姿态、安装或加工位置的坐标信息等,计算出位置坐标,并精确进行坐标转换,提供给机械臂等控制系统进行运动控制。对位精度达到5μm。
视觉引导定位系统就是利用相机进行视觉图像获取,通过图像分析处理和图像测量的方式精确目标物体的形态、姿态、安装或加工位置的坐标信息等,计算出位置坐标,并精确进行坐标转换,提供给机械臂等控制系统进行运动控制。 研新科技在视觉引导定位系统的算法中,我们**研发了精细定位算法,是采用单目视觉定位与双目视觉定位系统相结合的一种方法,利用两台高精度工业相机,两路高清图像采集卡,同时对图像进行获取,通过图像分析处理和图像测量的方式精确目标物体的形态、姿态、安装或加工位置的坐标信息等,计算出位置坐标,并精确进行坐标转换,提供给机械臂等控制系统进行运动控制。对位精度达到5μm。 河北视觉定位系统诚信企业推荐
浙江视觉定位系统价格
中国电子科技集团采购项目成功交付--高精微小部件的全自动视觉引导定位安装设备交付 2018年12月 宁波研新工业科技有限公司为中国电子科技集团开发的高精微小部件的全自动视觉引导定位安装是指将微小的零部件通过粘接的方式,安装到特定位置上。国内**采用双目视觉算法实现高精度立体定位技术的自动化工程应用。 应用背景: 研新科技研发的微小部件的全自动视觉引导定位安装系统,主要是针对那些由于尺寸微小,精度要求高,目前只能通过人工观察显微镜下的实时图像,来操作进行对准安装的生产工艺环节,解决其生产方式导致的耗时长、精度差、废品率高等问题。 关键技术实现: 1、 光学平台模组(双目相机+远心镜头+背光源) 2、 微米级三维直线电机运动平台、自动上料模块、机械手模块 3、 自动化控制系统、人机交互系统 4、 双目立体视觉(远心镜头标定、边缘提取和中心定位、表面特征 计算、垂直度矫正)浙江视觉定位系统价格
宁波研新工业科技有限公司是专业从事“高精度测量|表面缺点检测|视觉引导机械手系统|智能化产线 ”的企业,公司秉承“诚信经营,用心服务”的理念,为您提供质量的产品和服务。欢迎来电咨询!