象山视觉自动化高性价比的选择
宁波研新工业科技有限公司视觉自动化FOV是指相机实际拍摄的面积,以毫米×毫米表示。FOV是由像素多少和分辨率决定的。相同的相机,分辨率越大,它的FOV就越小。例如 1K*1K的相机,分辨率为20um,则他的FOV=1K*20×1k*20=20mm×20mm,如果用30um的分辨率,他 FOV=1K*30×1k*30=30mm×30mm。在图像中,表现图像细节不是由像素多少决定的,而是由分辨率决定的。分辨率是由选择的镜头焦距决定的,同一种相机,选用不同焦距的镜头,分辨率就不同。如果采用20um分辨率,对于1mm*0.5mm的零件,它总共占用像素1/0.02×0.5/0.02=50×25个像素,如果采用30um的分辨率,表示同一个元件,则有1/0.03×0.5/0.03=33×17个像素,显然20um的分辨率表现图像细节方面好过30um的分辨率。 宁波研新工业科技有限公司视觉自动化值得您终身信赖。象山视觉自动化高性价比的选择
通过右侧3D激光对产品的右表面进行扫描,采集整个右部的高度数据,同时左3D激光对产品的左表面进行扫描,采集整个左边的高度数据,综合左右3D激光的数据就可测出弹点的上下高度差和厚度。舌片厚度检测通过激光扫描成像后,利用算法算出X、Y参照位置,根据图纸测量检测点到公共基准的高度,然后计算出上下高度差即为该区域的厚度。焊脚平整度:通过激光扫描获取3D点云图之后,从产品塑胶基准上获取6个点的高度,构建基准平面,从产品焊脚上获取每个位置的高度信息,计算每个点到基准平面的高度为焊脚平整度,提取比较大值和最小值的差值为焊脚共面度。 慈溪视觉自动化按需定制宁波研新工业科技有限公司视觉自动化专业团队会为您服务。

宁波研新工业科技有限公司视觉自动化这项传感器的视觉扫描测头采用局域双目立体视觉测量原理设计。形貌整体拼接实质上是将所采集到的数据放到公共坐标上,这样就能得到整体的数据描述。通过高度辨率数码相机从测量空间的上方以不同的角度和位置对被测量进行数据收集,运用光束定向交汇平差原理得到控制点空间坐标并建立全局坐标系,然后通过各个坐标系进行关联、转换,完成数据拼接。视觉源于生物界获取外部环境信息的一种方式,是自然界生物获取信息的有效手段,是生物智能的中心组成之一。
机器视觉定位技术与自动化技术相结合的过程中,运动控制系统是结合的关键,我们采用运动控制编程技术,实现视觉坐标与机械坐标的完美转换与结合,实现精确定位。真正实现“眼手合一”。 研新科技擅长视觉技术与运动控制技术的结合,实现精密定位,自动化装配,自动化封装,结合了视觉技术的自动化设备适应性大大增强,可实现柔性化装配,智能化生产。为自动化产业升级提供了实现路径。 宁波研新工业科技有限公司位于宁波市鄞州区,欢迎咨询。宁波研新工业科技有限公司视觉自动化,质量是品牌的基础,质量是素质的体现,质量是市场的保证。
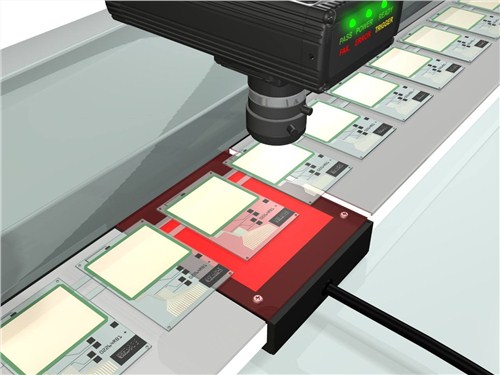
3.下面将重点介绍3D视觉系统在Type-c板端焊脚平整度及两边金手指厚度的检测应用。1、项目名称Type-c座AOI-3D检测2、项目要求检测产品高度、弹点对高及焊脚平整度。3、检测机构及工艺上工序直接将物料放入检测治具,检测治具对物料进行自导向,运动机构带动治具从下往上扫描,同时对产品两个面进行检测,检测完后,将物料移动到出料位,如果是坏品则进行排出动作,否则移动到下一工位。4、方案介绍4.1弹点对高检测。宁波研新工业科技有限公司视觉自动化。 宁波研新工业科技有限公司视觉自动化是面向全国服务的。山东视觉自动化共同合作
宁波研新工业科技有限公司视觉自动化面向全国服务。象山视觉自动化高性价比的选择
宁波研新工业科技有限公司视觉自动化背景减除法其实是一种特别的帧间差分法,背景减除法根据将当前帧图像与背景模型做差来实现对运动目标的检测。这种方法首先获取背景模型,并将其保存起来,当对某一帧图像进行检测时,用实时获取的帧图像与背景模型做差分运算,得到要检测的运动目标。光流法是当运动目标在监控场景中产生运动的时候,物体表面会形成位移矢量场,根据其变化可以得到运动目标。光流是指移动物体在其对应的灰度图像上的表面运动,在光流场中,运动目标的速度矢量形成的平面投影构成了目标的运动信息。 象山视觉自动化高性价比的选择
“高精度测量|表面缺点检测|视觉引导机械手系统|智能化产线 ”宁波研新工业科技有限公司,公司位于:宁波市鄞州区首南街道科技信息孵化园C栋101,多年来,宁波研新工业科技坚持为客户提供好的服务。欢迎广大新老客户来电,来函,亲临指导,洽谈业务。宁波研新工业科技期待成为您的长期合作伙伴!